Make a class based task. More...
#include <TaskCPP.h>
Public Member Functions | |
| TaskClassS (char const *name, TaskPriority priority_, unsigned portSHORT stackDepth_=0) | |
| Constructor. | |
| virtual | ~TaskClassS () |
| TaskHandle_t | getTaskHandle () const |
| Get Task Handle. | |
| bool | give () |
| Notify a Task as a semaphore. | |
| void | give_ISR (portBASE_TYPE &waswoken) |
| bool | notify (uint32_t value, eNotifyAction act) |
| Notify a Task. | |
| bool | notify_ISR (uint32_t value, eNotifyAction act, portBASE_TYPE &waswoken) |
| bool | notify_query (uint32_t value, eNotifyAction act, uint32_t &old) |
| bool | notify_query_ISR (uint32_t value, eNotifyAction act, uint32_t &old, portBASE_TYPE &waswoken) |
| void | priority (TaskPriority priority_) |
| Set Task priority. | |
| void | resume () |
| Resume the Task. | |
| void | suspend () |
| Suspend the Task. | |
| void | task () override=0 |
| task function. | |
Static Public Member Functions | |
| static void | delay (TickType_t time) |
| Delay for a period of time. | |
| static uint32_t | take (bool clear=true, TickType_t ticks=portMAX_DELAY) |
| Wait for a task Give notification. | |
| static uint32_t | wait (uint32_t clearEnter, uint32_t clearExit=0xFFFFFFFF, uint32_t *value=nullptr, TickType_t ticks=portMAX_DELAY) |
| Wait for task notification. | |
Protected Attributes | |
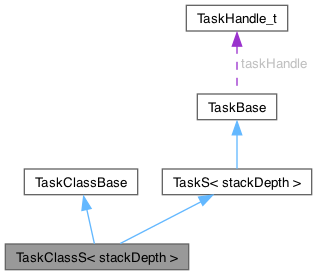
| TaskHandle_t | taskHandle |
| Handle for the task we are managing. | |
Detailed Description
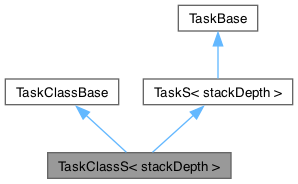
class TaskClassS< stackDepth >
Make a class based task.
Derive from TaskClass and the 'task()' member function will get called as the task based on the class.
- Template Parameters
-
stackDepth Size of the stack to give to the task
If task() returns the task will be deleted if deletion has been enabled.
Constructor & Destructor Documentation
◆ TaskClassS()
|
inline |
Constructor.
- Parameters
-
name The name of the task. priority_ The priority of the task. Use the TaskPriority enum values or a related value converted to a TaskPriority stackDepth_ How many words of stack to allocate to the task. Only used if the template parameter stackDepth is 0
API CHANGE! If at constrtuction time, the scheduler is not running, we can release the task. If the scheduler is running, because the task may startup before we finish constructing the task, the most derived constructor will need to give the task.
Change from previous API to support SMP mode where the previous trick won't work anymore.
References TaskBase::give().

◆ ~TaskClassS()
|
inlinevirtual |
Member Function Documentation
◆ delay()
|
inlinestaticinherited |
Delay for a period of time.
- Parameters
-
time the number of ticks to delay
This is a static member function as it affects the CALLING task, not the task it might be called on
◆ getTaskHandle()
|
inlineinherited |
Get Task Handle.
- Returns
- the task handle.
◆ give()
|
inlineinherited |
Notify a Task as a semaphore.
Sends a notification to a task using a semaphore based protocol. Generally the task should we using the take() function to receive the notification.
Referenced by TaskClassS< stackDepth >::TaskClassS().

◆ give_ISR()
|
inlineinherited |
◆ notify()
|
inlineinherited |
Notify a Task.
Generic Task Notification operation
◆ notify_ISR()
|
inlineinherited |
◆ notify_query()
|
inlineinherited |
◆ notify_query_ISR()
|
inlineinherited |
◆ priority()
|
inlineinherited |
Set Task priority.
Only available if INCLUDE_vTaskPrioritySet == 1
- Parameters
-
priority_ The TaskPriority to give the Task.
◆ resume()
|
inlineinherited |
Resume the Task.
Only available if INCLUDE_vTaskSuspend == 1
◆ suspend()
|
inlineinherited |
Suspend the Task.
Only available if INCLUDE_vTaskSuspend == 1
◆ take()
|
inlinestaticinherited |
Wait for a task Give notification.
Specialized wait() designed to work with the give()/give_ISR() notifications.
- Parameters
-
clear Flag to indicate if the action on succesful take is to clear (True) or decrement (False) the notification value. Effectively decides between a binary (True) or counting (False) semaphore behavior. ticks The time to wait for the semaphore.
- Returns
- Returns the notification word (prior to being adjusted for the take() ), Will be zero if the take() timed out.
Referenced by taskcpp_task_thunk().

◆ task()
|
overridepure virtual |
◆ wait()
|
inlinestaticinherited |
Wait for task notification.
Member Data Documentation
◆ taskHandle
|
protectedinherited |
Handle for the task we are managing.
The documentation for this class was generated from the following file: